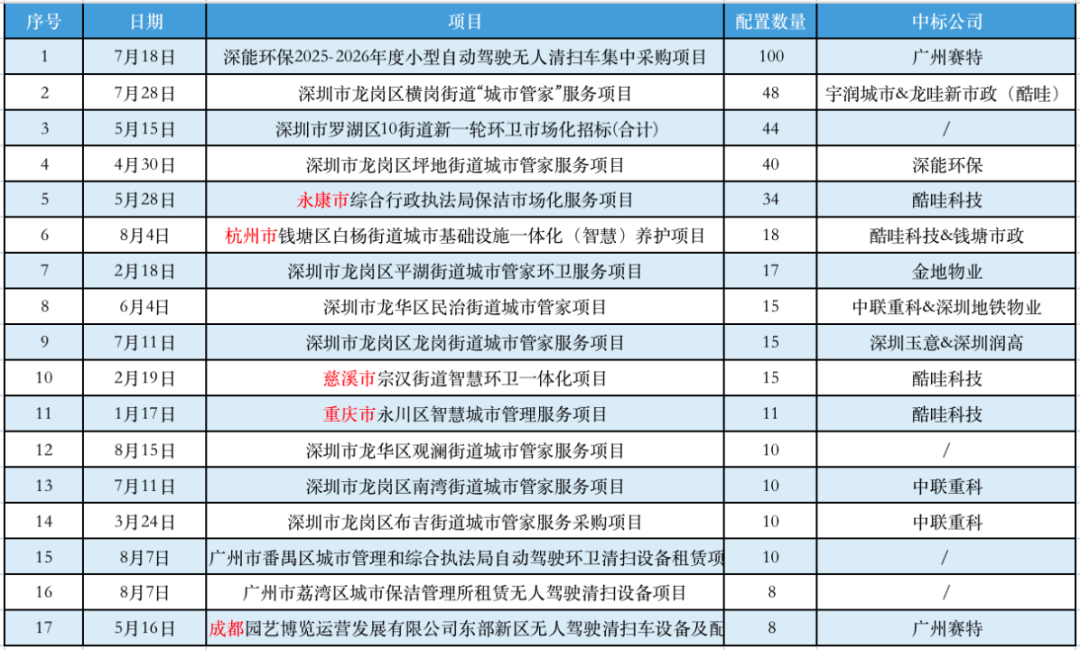
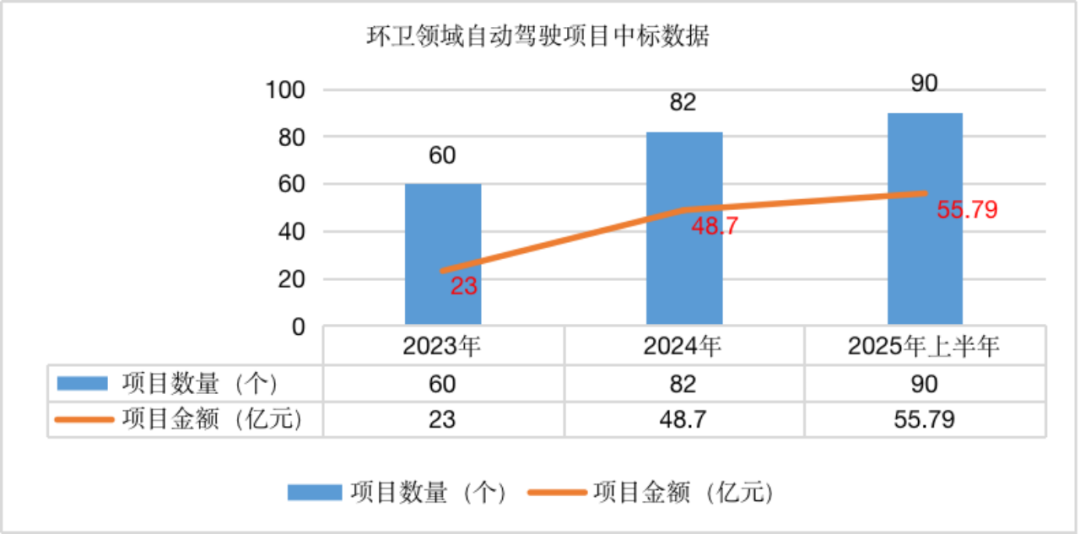
市政环卫因路线固定、低速作业,具备试验和推广自动驾驶的天然优势,观研天下数据显示,2025年上半年环卫清洁领域自动驾驶中标项目数量及金额均已超过2024年全年。
2025年,深圳市坪山区石井街道落地首个街道级全域全时全场景项目,计划到年底,累计投放60余台自动驾驶环卫车。
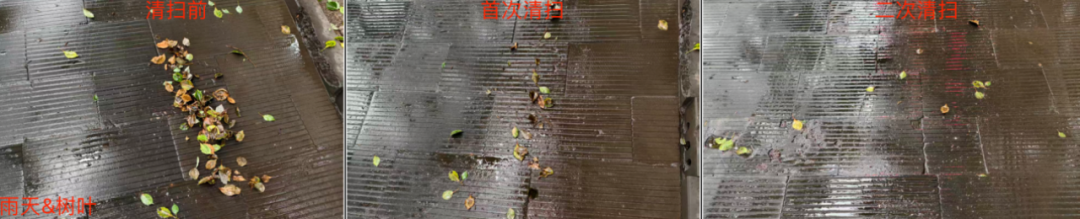
各地要求配置数台至几十台无人驾驶环卫车的项目在今年层出不穷,从深圳蔓延至全国的无人驾驶环卫车看似呈“井喷”之势。 除短期通过地方政府买单无人示范应用项目,如长期要广泛使用,车辆需达到高质量、高效率、稳定的清扫效果,才能真正解决环卫企业用工老龄化、用工难难题,减少企业用人成本。 我们通过近3个月无人驾驶清扫车实际作业,记录了其在各种作业场景下的真实表现。
从清扫效果来看,无人驾驶扫地机在路面干燥情况下,能较好地清扫树叶。 而对树枝、树果、白色垃圾等不论是路面干湿,特别是雨后,清扫效果是比较差的。 针对需贴边作业的区域,在直线和小弧度曲线场景下能较好贴边,当圆弧角度约90度或更小时,贴边距离较大,无法实现需贴边区域的较好清扫。 另外,在作业过程中,机器会因为避障导致车辆刹停或产生长短不一的反应时间,从而降低清扫效率。 并且因无法识别具体是哪一类障碍,如树枝、石墩、静止车辆等,车辆均会绕行,影响最终作业效果。 总体来讲,目前在封闭半封闭等特定场景作业,无人驾驶扫地机可做到稳定持续的作业,但是清扫效果和效率还不及传统作业模式。 现有无人环卫产品是基于智驾技术发展出来的,由于环卫车辆是低速行驶,相对乘用车智驾来说难度较低,所以无人驾驶扫地机能做到稳定驾驶。 而无人环卫需要实现区域内的清扫覆盖和清洁度,需要更符合环卫行业作业场景的具身智能模型,比如自动贴边、垃圾识别、障碍物材质识别、夜间作业、雨天作业、根据路面清洁度切换作业模式、非道路清洁、垃圾拾捡等功能,最终才能实现无人环卫产品的质的提升。



.jpg)