在自动驾驶环境感知技术的演进过程中,激光雷达始终处于核心位置。作为能够提供高精度三维空间信息的关键传感器,激光雷达的技术路径也正从传统脉冲式飞行时间(ToF)向调频连续波(FMCW)相干探测跨越。
虽然目前市场上绝大多数商用激光雷达仍采用脉冲测距技术,但调频连续波激光雷达因其可以直接测量瞬时速度、极高灵敏度以及天然的抗干扰优势,被业界公认为是实现全固态、芯片化感知的终极方案。
FMCW激光雷达有什么优势?
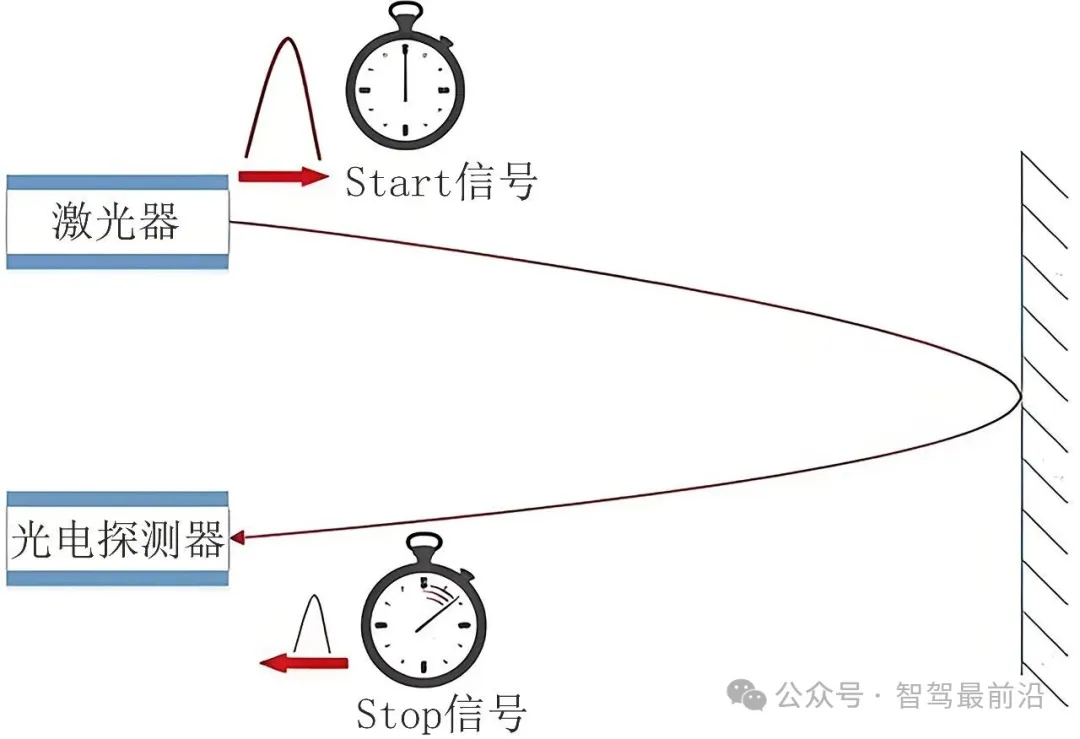
传统的激光雷达主要依赖飞行时间技术,其工作逻辑可以类比为回声定位。激光器发射一个极短的高能光脉冲,光束在空间中飞行并碰撞物体后反射,接收器计算发射与接收之间的时间差,结合光速便可得出距离。
图片源自:网络
这种方式直观且技术门槛相对较低,但其本质是基于光强度的直接探测,对光能的利用效率受限,且难以区分环境中的干扰光。
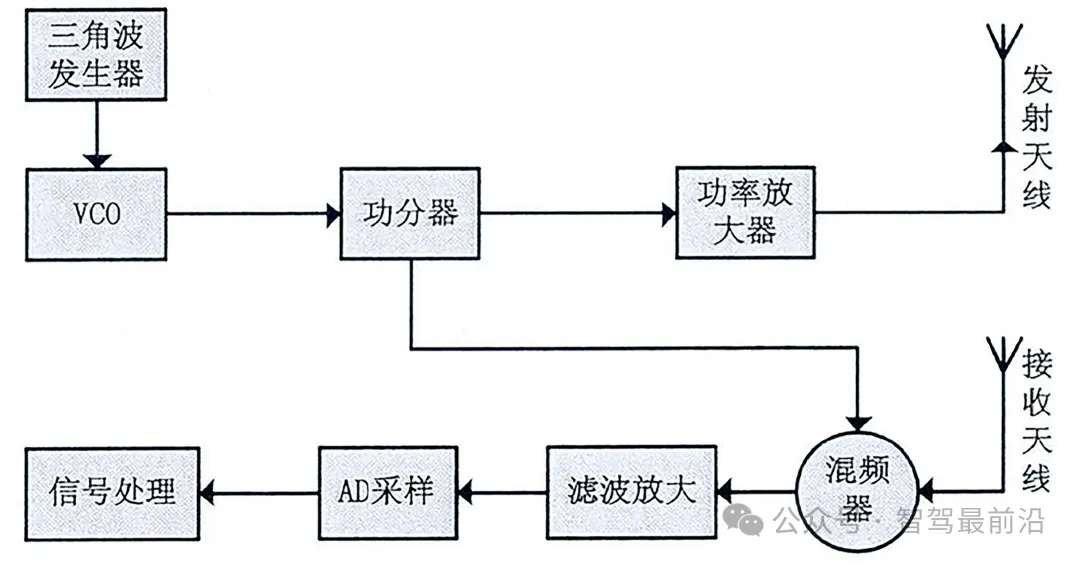
与之相对,调频连续波激光雷达则进入了波动的相位与频率领域。它不再是发射孤立的脉冲,而是持续发射一束频率随时间线性变化的连续光波,这种波形被称为啁啾信号。
当这束连续光遇到目标并返回时,由于传播过程中产生的时间延迟,回波信号的频率会与当前正在发射的激光频率产生一个差值,这种频率差与目标距离成正比。
这种测量方式的核心技术在于相干探测,即在接收端将反射回来的微弱光信号与本地的一束参考光进行叠加混合。这种混合过程会在探测器上产生“拍频”现象,即将极高频率的光波干涉转化为较低频率的电信号,方便后端电路处理。
相干探测赋予了系统极高的动态范围,因为本地参考光起到了光学放大的作用,使得雷达能够探测到功率极低的回波。这种机制让调频连续波激光雷达在仅使用毫瓦量级功率的情况下,就能实现数百米的远距离探测,远低于脉冲式雷达动辄数百瓦的峰值功率需求。
调频连续波示意图,图片源自:网络
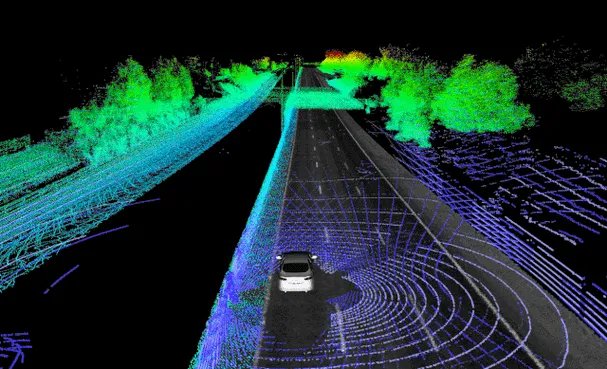
除了距离,速度是调频连续波激光雷达的另一个关键维度提升。由于发射的是连续波,系统可以利用光的多普勒效应。当目标物体相对于雷达运动时,反射光的频率会发生偏移。通过分析啁啾信号在上升沿和下降沿产生的两个拍频信号,算法就可以同时解析出距离和物体的瞬时径向速度。
这意味着激光雷达不再仅提供静态的三维坐标,而是输出自带速度矢量的“四维点云”。这种能力的提升对于自动驾驶决策系统至关重要,它可以让车辆在单帧时间内识别出物体的运动状态,而不需要像传统雷达那样通过对比多帧图像来计算位移,极大地缩短了紧急避障的反应时间。
这种从“强度探测”到“相干探测”的转变,让感知逻辑的底层实现升级。在复杂的交通环境中,由于相干探测器只对与本振光频率完全匹配的信号有响应,外界的太阳光或附近其他车辆发射的乱序光脉冲在系统眼中只是无法形成干涉的背景底噪。这种天然的抗干扰特性,解决了大规模自动驾驶车辆普及后,激光雷达之间可能出现的信号互扰难题。
FMCW激光雷达有什么挑战?
从前面可以知道调频连续波激光雷达相较于传统脉冲式激光雷达非常有优势,那为什么到现在还没有大量普及?
调频连续波激光雷达实现的难点首先就是对光源(激光器)有极致要求。调频连续波雷达要求激光器具有超窄的线宽,一般需要达到千赫兹甚至更低级别。线宽代表了激光频率的纯度,如果激光器输出的频率本身存在剧烈抖动,产生的相位噪声会直接淹没拍频信号,导致测距精度大幅下降,甚至无法在长距离上维持相干性。
目前主流的半导体激光器很难在保持足够输出功率的同时,长期维持如此高的频率稳定性,这就需要引入复杂的外部谐振腔或特定的反馈控制机制。
图片源自:网络
频率扫描的线性度是调频连续波激光雷达普及的另一大阻碍。调频连续波雷达工作的物理基础是频率随时间呈完美的线性增长。然而在实际工程中,激光器在调制过程中会因为载流子浓度变化、温度波动以及压电效应的滞后性,产生非线性的频率漂移。
即便这种非线性只有微小的百分比,也会导致傅里叶变换后的拍频信号发生展宽和变形,这将使得雷达的分辨率从厘米级恶化到分米级。为了纠正这种偏差,必须引入极其复杂的控制系统,如光电锁相环(OPLL)或者预失真校正电流等。这些手段虽然能提升性能,但同时也推高了系统的计算功耗和硬件成本。
调频连续波激光雷达最终要实现的是硅光集成。这意味着需要将激光源、调制器、光波导、移相器以及探测器等数十个精密光学元件,集成在一颗指甲盖大小的硅芯片上。
虽然硅基光电子技术已经在光通信领域得到了应用,但车载环境对光功率、探测距离以及工作温度范围的要求远比数据中心苛刻。硅本身并不是良好的发光材料,激光源就需要使用铟磷(InGaAsP)等化合物半导体,如何将这些异质材料与硅衬底进行低损耗的异质集成,是当前半导体制造领域的难题。
图片源自:网络
此外,激光在芯片内部传输时也会遭遇波导损耗,从芯片发射到自由空间时又会面临耦合挑战,这些都会削弱最终的探测距离。
除了光电层面的挑战,后端的数据处理同样面临巨大的计算压力。相干探测生成的拍频信号需要进行高频采样并实时进行快速傅里叶变换(FFT),以提取距离和速度信息。
相比于脉冲式雷达简单的计时逻辑,调频连续波雷达的数据处理量要高出几个数量级。在车载紧凑的空间和严格的功耗指标下,如何设计高效的专用集成电路(ASIC)来完成这些海量运算,是必须跨越的门槛。
FMCW激光雷达商业化阻碍
调频连续波虽然是激光雷达的未来,但在商业化进程中也有很多问题需要解决。目前自动驾驶行业呈现着一种有趣的分化,如Aeva和SiLC等新兴的科技企业坚定地推动4D相干探测的芯片化,而一些老牌玩家或芯片巨头则在进行更为审慎的权衡。
在当前的量产车市场,绝大多数L2+级别的辅助驾驶系统更看重传感器的成本和成熟度。905纳米的脉冲式雷达凭借完善的供应链和低廉的硅探测器成本,依然占据着统治地位。
Mobileye在2024年底决定终止内部调频连续波激光雷达的研发,是这一产业博弈中的标志性事件。作为自动驾驶感知领域的领军者,Mobileye认为其计算机视觉感知能力的提升超乎预期,结合自研的成像雷达已经能提供足够的速度维度信息。
图片源自:网络
在他们看来,第三方飞行时间雷达的价格下降极快,在商业逻辑上已经覆盖了当前乘用车市场的感知需求,而持续投入巨资研发尚不成熟的调频连续波技术,其边际收益在短期内并不显著。从这一点也可以看出,技术优越性在商业落地面前必须服从于成本收益曲线和产品上市周期。
当然,这并不意味着调频连续波激光雷达路线的终结。在重型货运卡车、无人接驳车以及更高级别的L4级机器人出租车(Robotaxi)领域,调频连续波激光雷达的优势依然无可替代。
重型卡车在高速公路行驶时需要超过300米的精准探测距离,且对速度的变化极其敏感,这正是调频连续波技术的用武之地。同时,随着硅光集成工艺的不断突破,调频连续波雷达有望通过芯片化实现跳跃式的降本。一旦单颗芯片能够集成扫描、测距与处理全流程,其成本结构将发生质变,从而反过来对传统机械式或半固态脉冲雷达形成市场冲击。最后的话
调频连续波激光雷达是一项上限极高且下限也极难的技术。它利用光的波动属性,在感知系统中引入了前所未有的相干维度,为自动驾驶车辆提供了类似于生物视觉与听觉融合的深度感知力。虽然目前它存在很多的问题需要解决,但随着自动驾驶算法对高确定性感知数据需求的日益增加,以及光子集成电路制造技术的成熟,调频连续波激光雷达终将从昂贵的实验室方案演变为大众消费车辆的标准配置,重塑道路安全的感知边界。



.jpg)