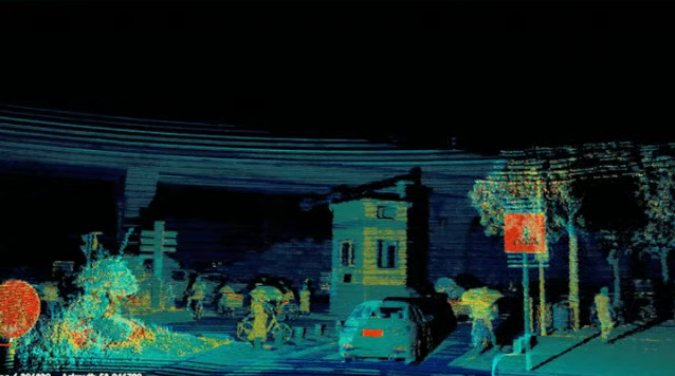
激光雷达(LiDAR)对于自动驾驶汽车来说,就是让自动驾驶汽车“看得见路”的感觉器官,它的工作原理简单描述,就是将激光束打出去、把回波接回来,最后生成三维点云的交通环境。对于车企来说,并不是把“激光雷达”挂在车上,就意味着车辆一定能够能看得清楚、判断得准交通环境,其实激光雷达探测环境的好坏有非常多的影响因素。
先从对于激光雷达最重要的,也是直观的“看得多远、看得多细、看得多稳”这三件事说起。一个激光雷达是否适合自动驾驶,基本上取决于它在距离(range)、角度/点云分辨率(resolution)、以及在现实世界复杂条件下的鲁棒性(robustness)。“距离”回答了你能在多远处发现目标、提前多久作出决策;“分辨率”决定了你能否分辨小物体或近距离复杂结构;“鲁棒性”则决定了在雨、雾、太阳直射或腰包里泥土时传感器还能不能靠谱工作。这三项看似简单,但每一项下面都藏着多个具体参数,在实际选用时需要逐一对照。对于激光雷达的选用,其实有多个参考参数。
第一类是基础物理与测量参数,即最大探测距离、最小测距范围、距离精度(accuracy)与重复性/精密度(precision)、回波强度(intensity)或反射率敏感度、脉冲能量和波长(常见905nm与1550nm之分)、多回波能力(multi-echo),以及死区和盲区等。
第二类是点云相关参数,即点云率(points per second,PPS)、水平与垂直角分辨率(angular resolution)、垂直通道数(channels)或阵列设计、探测视场(horizontal/vertical FOV)、扫描模式(旋转/固态MEMS/OPA/Flash)和扫描频率(rotation rate或frame rate)。
第三类是系统与工程参数,即时间戳与同步精度、延迟与抖动(latency/jitter)、温度与振动抗性、IP等级与可靠性(MTBF)、电源与功耗、体积重量与安装便利性、接口(Ethernet/CAN/ethernet+PoE)和软件驱动兼容性。
最后是环境与场景适应性,也就是激光雷达在雨、雪、雾、尘埃、日照下的探测能力、对低反射材料(深色衣物、黑色塑料)的探测概率、以及在多传感器融合场景下与摄像头、雷达的互补性。
激光雷达的这些参数并非独立,常常联系密切,在选择时更是“有得必有失”的权衡。比如要把探测距离推向200米以上,需要更高的发射能量或更灵敏的接收器,而这会触及眼安全规范(eye safety),价格也会显著上升;提高角分辨率更是意味着在同一时间内每个方向给出的点更密集,但如果不增加点云总数(PPS),那就必须牺牲扫描频率;而增加点云率会对车端算力和带宽提出更高要求。只有理解这些权衡,才能在产品选型或系统设计时做出合理取舍。
是不是还不够直观?那就举个常见的“点云密度/角分辨率”计算示例。假设一台LiDAR标称点云率为1,200,000点/秒(1.2Mpps),并且是64通道的旋转式设计,旋转频率为10Hz(即每秒10转)。我们要计算每转的点数、每转每通道的点数,以及由此得到的水平角分辨率。步骤很直接但要把算数写清楚,每秒点数乘以单转时间等于每转点数;单转时间等于1÷旋转频率。代入数值,1,200,000×(1÷10)=1,200,000×0.1=120,000点/转。把这120,000点在64个垂直通道之间分配,得到每通道每转的点数为120,000÷64=1,875点。水平角分辨率近似等于360°÷每通道每转点数,即360÷1,875≈0.192°。这意味着,在10Hz转速和1.2Mpps的条件下,单个通道的水平分辨率约为0.19度,若车辆在50米处,同一通道相邻两点之间的横向间距大约为50×tan(0.192°)(大约0.168米)。这个例子明确说明点云率、通道数和转速如何共同决定远处的点云密度,进而影响目标检测与轮廓还原能力。
说到这里,相信还会有许多人好奇,点云率越高就意味着激光雷达越好么?答案是否定的。如果只是单纯提高PPS,而不匹配合适的扫描模式、分辨率与算力支持,反而会造成数据拥堵和处理延迟,形成“有点但用不好”的尴尬局面。更重要的其实是点云的“有效点密度”,即落在目标表面的点数,而不是单纯的总点数。有效密度受目标大小、表面反射率、视角、距离以及扫描几何共同影响。对于一个行人(横向宽度约0.5米)在40米外能否被可靠检测,取决于水平角分辨率、垂直通道覆盖和回波强度。
说到点云质量,其实就不得不谈“噪声、精度与偏差”。距离精度指的是测到的距离与真实距离的偏差,重复性(precision)反映的是多次测量的稳定性。两者都很重要,如果偏差可校正(系统性误差),靠标定可以补偿;但如果噪声不可预测(随机误差)或随温度大幅变化,那对下游感知算法的影响就更致命。系统级评测中常测温漂(temperature drift)、多次标定后的残差,以及随振动、碰撞后的校准保持性。车辆是一个高振动、高温差的工作平台,商用化的LiDAR必须通过汽车级的振动、冲击、热循环和密封测试(如IP67/69K)才能被考虑用于量产车。
关于波长与眼安全,905nm与1550nm的选择关系到发射功率上限与成本。1550nm波长相对眼安全容许更高的发射功率,从而在相同比例下更容易实现更远的探测距离或更高SNR,但相关的激光源和探测器往往更昂贵,且生态链(器件供应、封装工艺)更复杂。905nm方案在成本和成熟度上一般更有优势,但在追求超远距(比如200m以上)性能时会遇到能量瓶颈。多回波(multi-echo)能力则在复杂场景(半透明目标、树叶、雨雪)里非常有用,因为它能返回多个回波,用来区分近表面与后方物体,减少错误深度估计。
再说说激光雷达对于天气与环境的适应性,激光雷达在雨、雪、雾中,光会被散射,回波能量骤减,导致最大有效探测距离显著下降。此处不能只看激光雷达硬件,一个好的系统还需要配合滤波、去噪和多传感器融合策略。例如在强降雨中,毫米波雷达对大颗粒反应更稳定,摄像头能提供颜色与纹理信息,两者与LiDAR融合能提高检测概率。厂商在规格表上给出的“最大探测距离”往往是在标准反射率(如10%或20%)且无雨雾的理想条件下测得,如果您是车企激光雷达的采购人员,务必要求厂商提供不同反射率、不同天气下的检测概率曲线,而不是一个单值的“最大距离”指标。
除了硬件之外,软件处理能力也决定了激光雷达“好不好用”。好的激光雷达厂商会提供高质量的驱动、低延迟的时间戳、稳定的包结构(点云格式),以及用于时空校正的算法(motion compensation、timestamp interpolation、intensity calibration)。此外,厂家能否提供预处理(去畸变、滤雨雪点云、时间同步到IMU/车轮里程计)和完整的测试数据集(包括不同天气、不同道路场景的原始点云)也会显著缩短集成团队的开发周期。一个看起来光学参数优秀的激光雷达,如果驱动欠缺、时间戳不准或没有足够的诊断信息,集成代价只会变得很高。
说了这么多,其实对于车企来说,在实际场景选型时,其实最关键的一点是“明确使用场景”。如果目标是高速场景(比如高速公路的自动巡航或L4区域的车道间长距离预判),你需要长探测距离、高SNR、低误差和良好的远距角分辨率;如果目标是城市复杂路段或泊车场景,近距性能、垂直分辨率、低最小探测距离和对小目标的检出率更重要。这意味着没有“放之四海皆准的最好激光雷达”,只有“适合我场景且在工程集成上最省力的激光雷达”。因此在评估时务必做场景化测试,在你要上车跑的典型路段、典型车速、典型天气与典型目标(行人、自行车、垃圾桶、反光路牌等)上跑一套测试,而不是只看实验室里给你的“最大距离”。
此外,对于厂商承诺与后勤支持也不能忽视。成熟厂商通常能提供完整的验证报告、软件更新机制(OTA)、长期供货计划和量产一致性保证。对于车厂或系统集成商,传感器的一致性(unit-to-unit variation)和可批量化的校准流程非常重要,否则每辆车上线都要浪费大量人工去调参。除了上面聊得这些,厂商的备件供应、维修服务、以及在国内外的技术支持网络,都会直接影响量产节奏和后装维护成本。
总结一下今天聊的内容,希望可以帮助读者将上面的理论落到实处。评估一款激光雷达时,不要被高PPS、很多通道或很远的“最大探测距离”单元的标签迷惑。一定要看三类实际数据,即检测概率随距离和反射率的曲线、在目标典型尺寸下的点云密度(包括垂直和水平方向)、以及在多种恶劣天气条件下的可用性百分比(比如0-5mm/h、5-20mm/h降雨条件下的可用性)。其次,要求厂商提供时间同步精度和延迟数据,因为在高速度场景下几毫秒的时间戳差异就会导致定位与感知错位。第三,与厂商协商获取原始点云样本(包括边界条件下的失败样本),把这些原始数据丢进你自己的感知算法里跑一遍。第四,重视软件与工程配套,良好的驱动、API、诊断信息和清晰的标定流程往往能把“纸面上略逊一筹”的传感器在系统里调到更好;反之,硬件再牛如果没有好的软件支撑,也可能成为项目瓶颈。第五,考虑系统冗余与传感器定位,单一激光雷达出故障的后果与多个不同类型传感器组合的鲁棒性差异,也应纳入成本效益分析里。
评判激光雷达好坏不能只看单个参数,必须从“场景需求—物理参数—系统集成—软件支持—可靠性验证”的系统视角出发。点云率、通道数、波长、探测距离、角分辨率、时间同步、天气鲁棒性和厂商工程支持,这些都是要逐一验证的要素。只有把厂商提供的规格转化为对你场景的检测概率曲线与点云密度图,做场景化的验收测试,配合多传感器融合和稳健的软件预处理,才是把激光雷达发挥到极致的正确路径。



.jpg)